Emerging Flight Intelligence
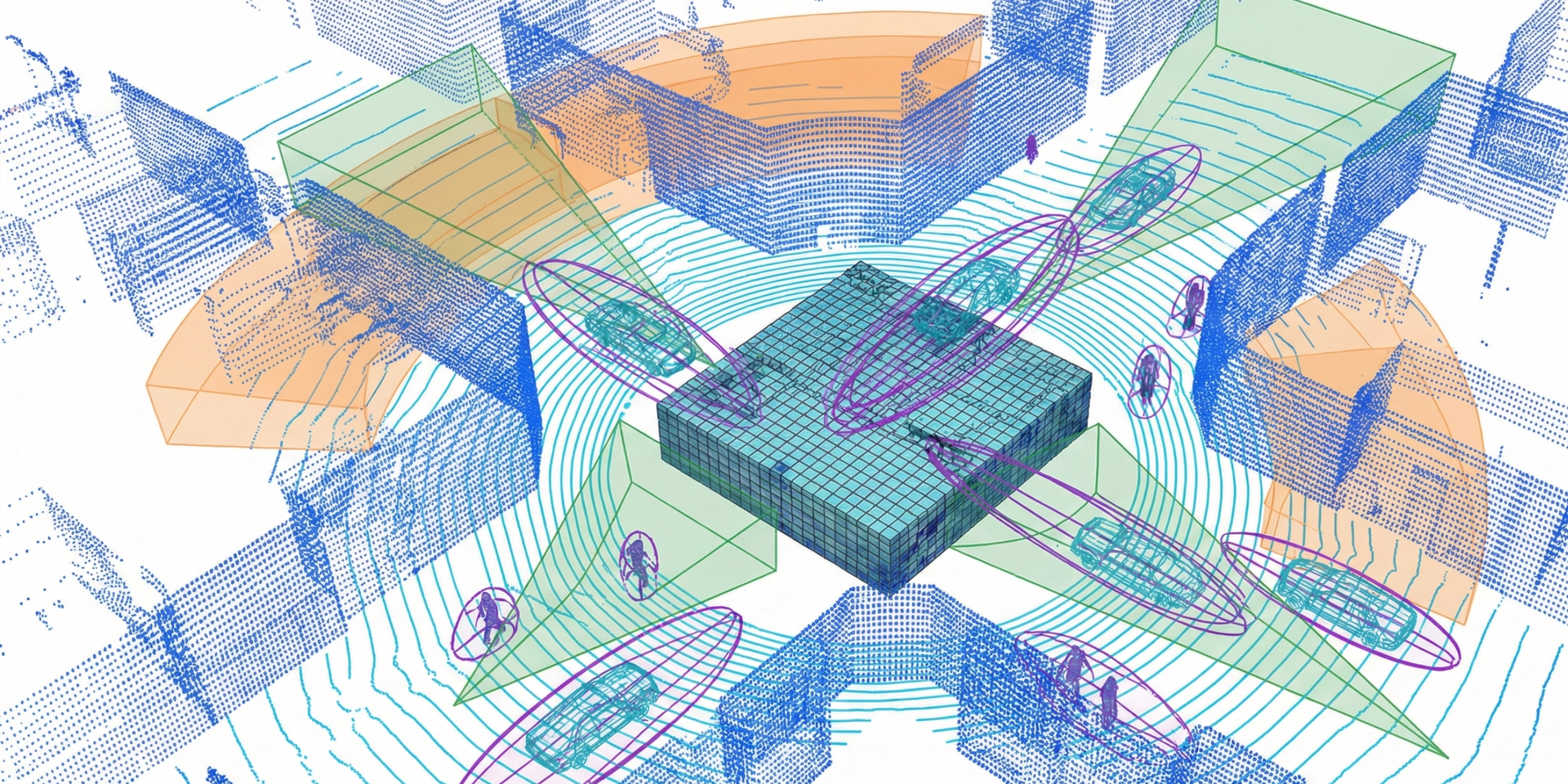
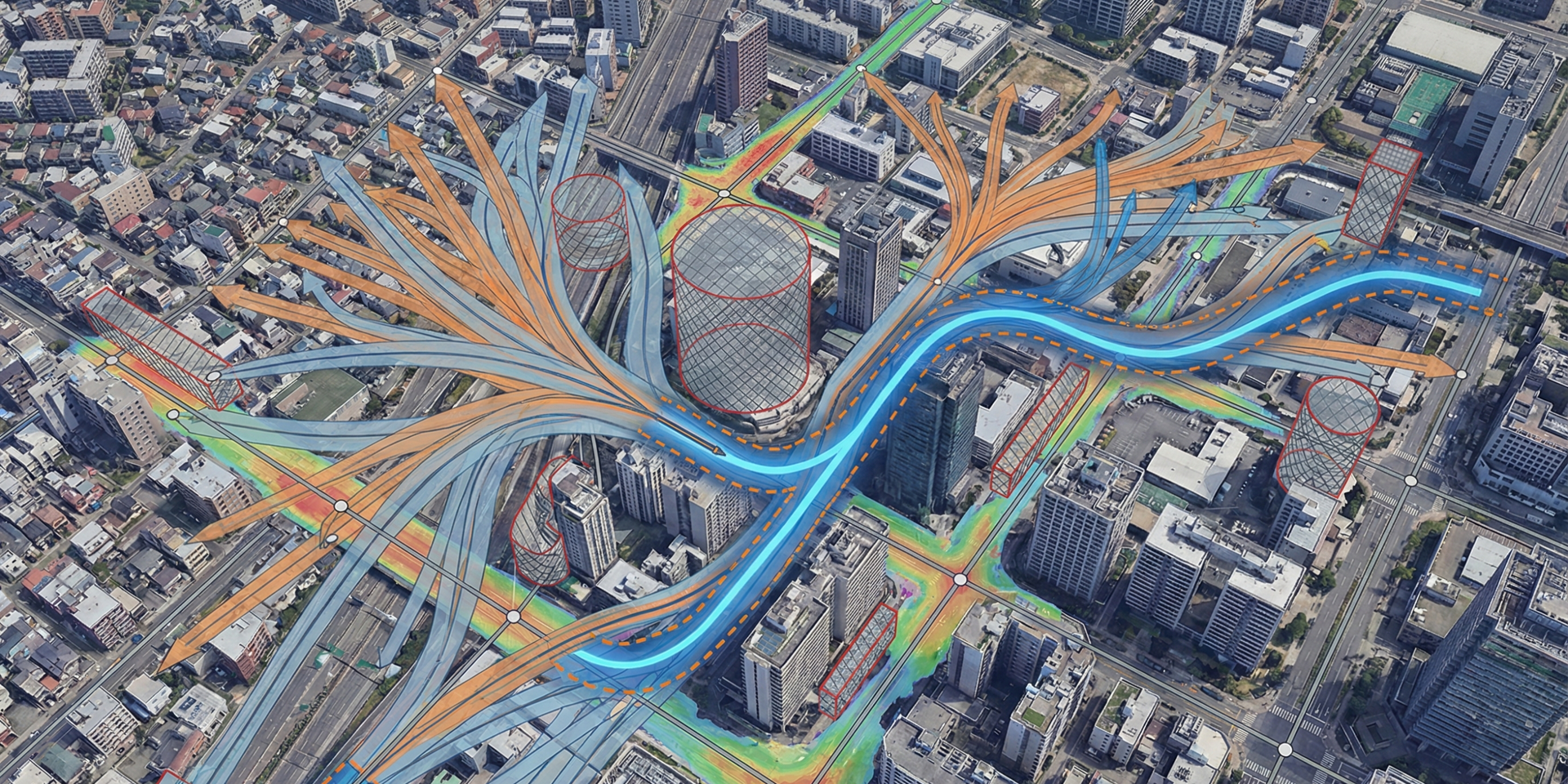
The eVTOL Autonomy and AI Research (eVAIR) team is a student led, multidisciplinary research program within the Texas A&M Vertical Flight Society focused on developing end to end artificial intelligence systems for autonomous eVTOL flight. eVAIR investigates perception, decision making, and control for operation in dense, high paced urban environments, where aircraft must reason under uncertainty, react to dynamic obstacles, and manage risk in real time. The team approaches autonomy as a full stack problem, integrating sensing, state estimation, learning based decision making, and safety constrained control into cohesive architectures validated through simulation and hardware testing.
eVAIR operates under a research driven methodology modeled after modern aerospace and robotics labs, emphasizing problem formulation, reproducibility, and technical rigor. Core efforts include urban navigation and path planning, onboard perception and scene understanding, real time risk assessment and mitigation, and learning enabled flight behaviors under operational constraints. The program's primary objective is to produce publishable technical work and present results at the national Vertical Flight Society Forum, contributing student led research to the broader vertical flight and autonomy community. Through this structure, eVAIR serves as a platform for advancing autonomous flight theory into practice while preparing members for graduate research, advanced robotics roles, and autonomy focused aerospace careers.

eVAIR members are selectively recruited to form a focused research team dedicated to advancing autonomous vertical flight through rigorous, publishable technical work. The team is organized into two tightly integrated subteams focused on path planning and sensor fusion, enabling parallel research while maintaining strong system level cohesion across the autonomy stack. Core research priorities include perception driven navigation, real time decision making, and risk aware autonomy for eVTOL aircraft operating in dense urban environments, with success measured by technical depth, experimental validation, and clarity of results rather than competition outcomes. This structure mirrors modern aerospace autonomy research groups and prepares members for graduate research and autonomy focused engineering roles, with the goal of presenting original work at the national Vertical Flight Society Forum.